
3.2 Solving Systems using Matrices
While the techniques we learned in the last section can be used to solve any 2-by-2 or 3-by-3 system of linear equations, mathematicians often look for ways to do problems while writing less (which is why we use single letters for variables instead of full words), and to make solving problems more procedural. For systems of linear equations, matrices are the tool we use. In addition to making solving small systems more straightforward, the techniques can be extended to solve 4-by-4, 100-by-100, or even larger systems of linear equations that common arise in science.
Matrix
A matrix is a rectangular array of numbers arranged into rows and columns.
Writing the Augmented Matrix of a System of Equations
A matrix can serve as a device for representing and solving a system of equations. To express a system in matrix form, we extract the coefficients of the variables and the constants, and these become the entries of the matrix. We use a vertical line to separate the coefficient entries from the constants, essentially replacing the equal signs. When a system is written in this form, we call it an augmented matrix.
Writing an Augmented Matrix given a System of Equations.
1. Write the coefficients of the x-terms as the numbers down the first column.
2. Write the coefficients of the y-terms as the numbers down the second column.
3. If there are z-terms, write the coefficients as the numbers down the third column.
4. Draw a vertical line and write the constants to the right of the line.
Example Writing Systems as Augmented Matrices
a. Consider the following system of equations. Write this system as an augmented matrix:

Extracting the coefficients from the system and write them in a rectangular array. This is called the coefficient matrix.
![\left[\begin{array}{cc} 3&4\\ 4&-2\end{array} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-55607c2c2bcfd859a4831595179cf5e1_l3.png "Rendered by QuickLaTeX.com")
We then draw a vertical line and extract the constants from the right hand side of the system equations. This is the augmented matrix for the given system.
![\left[ {\left. {\begin{array}{*{20}{c}} 3&4\\ 4&{ - 2} \end{array}} \right|\begin{array}{*{20}{c}} 7\\ 5 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-ad03b259904b0ab8f4af795246e431f9_l3.png "Rendered by QuickLaTeX.com")
b. Write the augmented matrix for the three-by-three system of equations

The coefficient matrix is
![\left[ {\begin{array}{*{20}{c}} 3&{ - 1}&{ - 1}\\ 1&1&0\\ 2&0&{ - 3} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-66a2190a876a8325db0c6aa9ed5ad30c_l3.png "Rendered by QuickLaTeX.com")
And the system is represented by the augmented matrix
![\left[ {\left. {\begin{array}{*{20}{c}} 3&{ - 1}&{ - 1}\\ 1&1&0\\ 2&0&{ - 3} \end{array}\,} \right|\,\,\,\begin{array}{*{20}{c}} 0\\ 5\\ 2 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-ec22a3b8a033244bf79f8cdb33fbf6e6_l3.png "Rendered by QuickLaTeX.com")
Notice that the matrix is written so that the variables line up in their own columns:  -terms go in the first column,
-terms go in the first column,  -terms in the second column, and
-terms in the second column, and  -terms in the third column. It is very important that each equation is written in standard form
-terms in the third column. It is very important that each equation is written in standard form  so that the variables line up. When there is a missing variable term in an equation, the coefficient is 0.
so that the variables line up. When there is a missing variable term in an equation, the coefficient is 0.
Try it Now 1
Write the augmented matrix of the given system of equations.

Writing a System of Equations from an Augmented Matrix
We can use augmented matrices to help us solve systems of equations because they simplify operations when the systems are not encumbered by the variables. However, it is important to understand how to move back and forth between formats in order to make finding solutions smoother and more intuitive. Here, we will use the information in an augmented matrix to write the system of equations in standard form.
Example Writing an Augmented Matrix as a System
Find the system of equations from the augmented matrix.
![\left[ {\left. {\begin{array}{*{20}{c}} 1&{ - 3}&{ - 5}\\ 2&{ - 5}&{ - 4}\\ { - 3}&5&4 \end{array}} \right|\begin{array}{*{20}{c}} { - 2}\\ 5\\ 6 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-0f9942d5fbb7fdfba92b48cd16b012c7_l3.png "Rendered by QuickLaTeX.com")
When the columns represent the variables , , and ,
![\left[ {\left. {\,\begin{array}{*{20}{c}} {\,\,1}&{ - 3}&{ - 5}\\ {\,\,2}&{ - 5}&{ - 4}\\ { - 3}&{\,\,5}&{\,\,4} \end{array}\,\,} \right|\begin{array}{*{20}{c}} { - 2}\\ {\,\,5}\\ {\,\,6} \end{array}} \right] \to \begin{array}{*{20}{c}} {x - 3y - 5z = - 2,}\\ {2x - 5y - 4z = 5,}\\ { - 3x + 5y + 4z = 6} \end{array}](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-fd3da13c6dcf89c4b1efff190f9f630f_l3.png "Rendered by QuickLaTeX.com")
Try it Now 2
Write the system of equations from the augmented matrix.
![\left[ {\begin{array}{*{20}{c}} 1&{ - 1}&{\,\,1}\\ 2&{ - 1}&{\,\,3}\\ 0&{\,\,\,1}&{\,\,1} \end{array}\,\,\,\left| {\,\,\begin{array}{*{20}{c}} {\,\,5}\\ {\,\,1}\\ { - 9} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-7fdaeb5707108aad7e840f50a77244e8_l3.png "Rendered by QuickLaTeX.com")
Performing Row Operations on a Matrix
Now that we can write systems of equations in augmented matrix form, we will examine the various row operations that can be performed on a matrix, such as addition, multiplication by a constant, and interchanging rows. These are all operations that can be performed without changing the solution to the corresponding system.
Performing row operations on a matrix is the method we use for solving a system of equations, since these operations allow us to change a complex system into an equivalent simpler one with the same solution. In order to solve the system of equations, we want to convert the matrix to row–echelon form, in which there are ones down the main diagonal from the upper left corner to the lower right corner, and zeros in every position below the main diagonal as shown.
![\[\begin{array}{c} {\textsf{Row - echelon form}}\\ \left[ {\begin{array}{*{20}{c}} 1&a&b\\ 0&1&d\\ 0&0&1 \end{array}} \right] \end{array}\]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-a6a3db7bf80aa4f4c6476c9c4d1c18bf_l3.png "Rendered by QuickLaTeX.com")
We use row operations corresponding to equation operations to obtain a new matrix that is row-equivalent in a simpler form.
Guidelines for Row-Echelon Form.
1. In any nonzero row, the first nonzero number is a 1. It is called a leading 1.
2. Any all-zero rows are placed at the bottom on the matrix.
3. Any leading 1 is below and to the right of a previous leading 1.
4. Any column containing a leading 1 has zeros in all other positions in the column.
Solving a System of Equations using Row Operations
To solve a system of equations we can perform the following row operations to convert the coefficient matrix to row-echelon form and do back-substitution to find the solution.
- Interchange rows. (Notation:
 )
) - Multiply a row by a constant. (Notation:
 )
) - Add the product of a row multiplied by a constant to another row. (Notation:
 )
)
Each of the row operations corresponds to the operations we have already learned to solve systems of equations in three variables. With these operations, there are some key moves that will quickly achieve the goal of writing a matrix in row-echelon form. To obtain a matrix in row-echelon form for finding solutions, we use Gaussian elimination, a method that uses row operations to obtain a 1 as the first entry so that row 1 can be used to convert the remaining rows.
Gaussian Elimination
The Gaussian elimination method refers to a strategy used to obtain the row-echelon form of a matrix. The goal is to write matrix with the number 1 as the entry down the main diagonal and have all zeros below.
![\[A = \left[ {\begin{array}{*{20}{c}} {{a_{11}}}&{{a_{12}}}&{{a_{13}}}\\ {{a_{21}}}&{{a_{22}}}&{{a_{23}}}\\ {{a_{31}}}&{{a_{32}}}&{{a_{33}}} \end{array}} \right] \longrightarrow A = \left[ {\begin{array}{*{20}{c}} 1&{{b_{12}}}&{{b_{13}}}\\ 0&1&{{b_{23}}}\\ 0&0&1 \end{array}} \right]\]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-ece839fb80c143b6ba82fcd3eeca32b9_l3.png "Rendered by QuickLaTeX.com")
The first step of the Gaussian strategy includes obtaining a 1 as the first entry, so that row 1 may be used to alter the rows below.
Using Row Operations on an Augmented Matrix to Achieve Row-Echelon Form.
1. The first equation should have a leading coefficient of 1. Interchange rows or multiply by a constant, if necessary.
2. Use row operations to obtain zeros down the first column below the first entry of 1.
3. Use row operations to obtain a 1 in row 2, column 2.
4. Use row operations to obtain zeros down column 2, below the entry of 1.
5. Use row operations to obtain a 1 in row 3, column 3.
6. Continue this process for all rows until there is a 1 in every entry down the main diagonal and there are only zeros below.
7. If any rows contain all zeros, place them at the bottom.
Examples using Gaussian Elimination
a. Solve the given system by Gaussian elimination.

First, we write this as an augmented matrix.
![\left[ {\left. {\begin{array}{*{20}{c}} 2&3\\ 1&{ - 1} \end{array}\,} \right|\,\,\begin{array}{*{20}{c}} 6\\ {\,\,\frac{1}{2}\,\,} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-ba4c3b80cfe8d54ae22ef9e132468534_l3.png "Rendered by QuickLaTeX.com")
We want a 1 in row 1, column 1. This can be accomplished by interchanging row 1 and row 2.
![{R_1} \leftrightarrow {R_2} \to \left[ {\left. {\begin{array}{*{20}{c}} 1&{ - 1}\\ 2&{\,\,3} \end{array}\,\,} \right|\begin{array}{*{20}{c}} {\,\,\frac{1}{2}}\\ {\,\,\,6} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-740ed943cb3e601829eca027b01799c8_l3.png "Rendered by QuickLaTeX.com")
We now have a 1 as the first entry in row 1, column 1. Now let’s obtain a 0 in row 2, column 1. This can be accomplished by multiplying row 1 by -2, and then adding the result to row 2.
![- 2{R_1} + {R_2} = {R_2} \to \left[ {\left. {\begin{array}{*{20}{c}} 1&{ - 1}\\ 0&{5} \end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}} {\frac{1}{2}}\\ 5 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-d2263166732467aed901fda5eda19eb8_l3.png "Rendered by QuickLaTeX.com")
We only have one more step, to multiply row 2 by  .
.
![\frac{1}{5}{R_2} = {R_2} \to \left[ {\left. {\begin{array}{*{20}{c}} 1&{ - 1}\\ 0&{1} \end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}} {\frac{1}{2}}\\ 1 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-474a9794fe786f206e418886e8247ef1_l3.png "Rendered by QuickLaTeX.com")
Use back-substitution. The second row of the matrix represents  . Back-substitute into the first equation.
. Back-substitute into the first equation.


The solution is the point  .
.
b. Use Gaussian elimination to solve the given system of equations.

Write this as an augmented matrix.
![\left[ {\left. {\begin{array}{*{20}{c}} 2&1\\ 4&{2} \end{array}\,} \right|\,\,\begin{array}{*{20}{c}} 1\\ {\,\,6\,\,} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-cc274b2469fd98f9edcba5fececfd3a5_l3.png "Rendered by QuickLaTeX.com")
We want a 1 in row 1, column 1. This can be accomplished by multiplying the first row by 
![\frac{1}{2}{R_1} = {R_1} \to \left[ {\left. {\begin{array}{*{20}{c}} 1&{\frac{1}{2}}\\ 4&2 \end{array}} \right|\,\,\,\begin{array}{*{20}{c}} {\frac{1}{2}}\\ 6 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-6b031d0a5b91b9d875884d89c1b94c5f_l3.png "Rendered by QuickLaTeX.com")
Next, we want a 0 in row 2, column 1. Multiply row 1 by -4, and add the result to row 2.
![- 4{R_1} + {R_2} = {R_2} \to \left[ {\left. {\begin{array}{*{20}{c}} 1&{\frac{1}{2}}\\ 0&{0} \end{array}} \right|\,\,\,\,\begin{array}{*{20}{c}} {\frac{1}{2}}\\ 4 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-4e83bf4bc6b6b996abad217682e460bb_l3.png "Rendered by QuickLaTeX.com")
The second row represents the equation  . Therefore, the system is inconsistent and has no solution.
. Therefore, the system is inconsistent and has no solution.
c. Solve the system of equations.

Perform row operations on the augmented matrix to try and achieve row-echelon form.
![A = \left[ {\begin{array}{*{20}{c}} 3&4\\ 6&8 \end{array}\,\,\,\left| {\begin{array}{*{20}{c}} {12}\\ {\,\,24} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-494a94e99466fa307fdf2a6840f954e6_l3.png "Rendered by QuickLaTeX.com")
![\begin{array}{l} - \frac{1}{2}{R_2} + {R_1} = {R_1} \to \left[ {\begin{array}{*{20}{c}} 0&0\\ 6&8 \end{array}\left| {\begin{array}{*{20}{c}} 0\\ {24} \end{array}} \right.} \right]\,\,\,\\ {R_1} \leftrightarrow {R_2} \to \left[ {\begin{array}{*{20}{c}} 6&8\\ 0&0 \end{array}\left| {\,\,\begin{array}{*{20}{c}} {24}\\ 0 \end{array}} \right.} \right] \end{array}](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-c88d6b12c0641c5583364589c53b516a_l3.png "Rendered by QuickLaTeX.com")
The matrix ends up with all zeros in the last row:  . Thus, there are an infinite number of solutions and the system is classified as dependent. To find the generic solution, return to one of the original equations and solve for .
. Thus, there are an infinite number of solutions and the system is classified as dependent. To find the generic solution, return to one of the original equations and solve for .



So the solution to this system is  .
.
d. Perform row operations on the given matrix to obtain row-echelon form.
![\left[ {\left. {\begin{array}{*{20}{c}} {\,\,1}&{ - 3}&{\,4}\\ {\,\,\,2}&{ - 5}&{\,6}\\ { - 3}&{\,\,\,3}&{\,\,4} \end{array}\,} \right|\begin{array}{*{20}{c}} 3\\ 6\\ 6 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-1b1626c9e88c971f460bf669fa257100_l3.png "Rendered by QuickLaTeX.com")
The first row already has a 1 in row 1, column 1. The next step is to multiply row 1 by -2 and add it to row 2. Then replace row 2 with the result.
![- 2{R_1} + {R_2} = {R_2} \to \left[ {\left. {\,\begin{array}{*{20}{c}} {\,1}&{ - 3}&{\,\,4}\\ {\,\,0}&{\,1}&{ - 2}\\ { - 3}&{\,3}&{\,\,4} \end{array}\,} \right|\begin{array}{*{20}{c}} 3\\ 0\\ 6 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-296b44399470e354f66c8ff7cedf3e92_l3.png "Rendered by QuickLaTeX.com")
Next, obtain a zero in row 3, column 1.
![3{R_1} + {R_3} = {R_3} \to \left[ {\left. {\,\begin{array}{*{20}{c}} {\,1}&{ - 3}&{\,\,4}\\ {\,\,0}&{\,\,1}&{ - 2}\\ {\,0}&{\, - 6}&{\,\,16} \end{array}\,} \right|\begin{array}{*{20}{c}} 3\\ 0\\ {15} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-53364ca2e583b379749f4d896186508e_l3.png "Rendered by QuickLaTeX.com")
Next, obtain a zero in row 3, column 2.
![6{R_2} + {R_3} = {R_3} \to \left[ {\left. {\,\begin{array}{*{20}{c}} {\,1}&{ - 3}&{\,\,4}\\ {\,\,0}&{\,\,1}&{ - 2}\\ {\,0}&{\,0}&{\,\,4} \end{array}\,} \right|\begin{array}{*{20}{c}} 3\\ 0\\ {15} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-4ef85f697f0f0c4fbec5095d01b5a7af_l3.png "Rendered by QuickLaTeX.com")
The last step is to obtain a 1 in row 3, column 3.
![\frac{1}{4}{R_3} = {R_3} \to \left[ {\left. {\,\begin{array}{*{20}{c}} {\,1}&{ - 3}&{\,\,4}\\ {\,\,0}&{\,\,1}&{ - 2}\\ {\,0}&{\,0}&{\,\,1} \end{array}\,} \right|\begin{array}{*{20}{c}} 3\\ { 0}\\ {\frac{{15}}{4}} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-727d040a301acc2077e3dd14a52734f6_l3.png "Rendered by QuickLaTeX.com")
Try it Now 3
a. Solve the given system by Gaussian elimination.

b. Write the system of equations as an augmented matrix, then perform row operations to obtain row-echelon form.

Gauss-Jordan Elimination
We can find the solutions of systems of equations from Gaussian Elimination. However, we can continue to reduce the augmented matrix until the matrix is in reduced row-echelon form, which means that it’s in row-echelon form with 1 or 0 in the diagonals and zeros in every row which has a 1 on the diagonal. Our goal is to create what is called an Identity Matrix out of the coefficient matrix and this will give us the solution on the other side of the augmented matrix. If a diagonal becomes a 0, we end up with a inconsistent or dependent system. If our row of zeros in the identity matrix corresponds with a 0 on the other side, we have a dependent system and creating the general solution is very easy. If our row of zeros is set to equal a non-zero number, then we have an inconsistent system with no solution.
Example of Gauss-Jordan Elimination
Solve the system of linear equations using matrices.

First, we write the augmented matrix.
![\left[ {\begin{array}{*{20}{c}} 1&{ - 1}&1\\ 2&{\,\,\,3}&{ - 1}\\ 3&{ - 2}&{ - 9} \end{array}\,\,\,\left| {\,\begin{array}{*{20}{c}} {\,\,8}\\ { - 2}\\ {\,\,9} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-16225d56a88a2223fd2b2b079532fac3_l3.png "Rendered by QuickLaTeX.com")
Next, we perform row operations to obtain row-echelon form.
The easiest way to obtain a 1 in row 2 of column 1 is to interchange  and
and  .
.
![{\rm{Interchange}}\;{R_2}\;{\rm{and}}\;{R_3} \to \left[ {\begin{array}{*{20}{c}} 1&{ - 1}&{\,\,\,\,1}\\ 0&{\,\,\,1}&{ - 12}\\ 0&{\,\,\,\,5}&{ - 3} \end{array}\,\,\,\,\left| {\,\begin{array}{*{20}{c}} {\,\,\,\,\,8}\\ { - 15}\\ { - 18} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-401991c27b8b16192bfccc23ff9827ca_l3.png "Rendered by QuickLaTeX.com")
Then
![\begin{array}{l} - 5{R_2} + {R_3} = {R_3} \to \left[ {\begin{array}{*{20}{c}} 1&{ - 1}&{\,\,\,\,1}\\ 0&{\,\,\,1}&{ - 12}\\ 0&{\,\,0}&{\,\,\,57} \end{array}\,\,\,\left| {\,\,\,\begin{array}{*{20}{c}} {\,\,\,8}\\ { - 15}\\ {\,\,57} \end{array}} \right.} \right]\,\,\,\,\,\,\\ \,\frac{1}{{57}}{R_3} = {R_3} \to \left[ {\begin{array}{*{20}{c}} 1&{ - 1}&{\,\,\,1}\\ 0&{\,\,\,1}&{ - 12}\\ 0&{\,\,\,0}&{\,\,\,\,1} \end{array}\,\,\left| {\,\,\,\begin{array}{*{20}{c}} {\,\,\,\,8}\\ { - 15}\\ {\,\,\,\,1} \end{array}} \right.} \right] \end{array}](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-f7f85ad2b814e475647b83319eb3a39d_l3.png "Rendered by QuickLaTeX.com")
Now, we are in row-echelon form, but we want to continue reducing until all the off diagonals in the coefficient matrix are 0’s. We want to make the -12 in the 2nd row, 3rd column into a 0. We can do that by replacing by  . We also need to replace the 1 in the 1st row, 3rd column to 0 by replacing
. We also need to replace the 1 in the 1st row, 3rd column to 0 by replacing  with
with  :
:
![\begin{array}{l} 12{R_3} + {R_2} = {R_2} \to \left[ {\begin{array}{*{20}{c}} 1&{ - 1}&{\,1}\\ 0&{\,\,\,1}&0\\ 0&{\,\,0}&{\,1} \end{array}\,\,\,\left| {\,\,\,\begin{array}{*{20}{c}} {\,\,\,8}\\ { - 3}\\ {\,\,1} \end{array}} \right.} \right]\,\,\,\,\,\,\\ - 1{R_3} + {R_1} = {R_1} \to \left[ {\begin{array}{*{20}{c}} 1&{ - 1}&{\,\,0}\\ 0&{\,\,\,1}&0\\ 0&{\,\,\,0}&{\,1} \end{array}\,\,\left| {\,\,\,\begin{array}{*{20}{c}} {\,\,\,\,7}\\ { - 3}\\ {\,\,\,\,1} \end{array}} \right.} \right] \end{array}](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-78718f43612d7a231bc05032037674fe_l3.png "Rendered by QuickLaTeX.com")
Now we only need to change the 1st row, 2nd column to 0, which is accomplished by replacing with  :
:
![{R_2} + {R_1} = {R_1} \to \left[ {\begin{array}{*{20}{c}} 1&0&{\,0}\\ 0&{\,\,\,1}&0\\ 0&{\,\,0}&{\,1} \end{array}\,\,\,\left| {\,\,\,\begin{array}{*{20}{c}} {\,\,\,4}\\ { - 3}\\ {\,\,1} \end{array}} \right.} \right]\,\,\,\,\,\,](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-c04b715cb35fc766e154c0a7615e55c5_l3.png "Rendered by QuickLaTeX.com")
Now that the left side, or coefficient side of this matrix is the identity matrix, when we write this back to an equivalent system, we have:
 .
.
Or as an ordered triple, the solution is  .
.
Try it Now 4

Using Technology with Matrices
Using these approaches, a system of linear equations of any size can be solved by Gaussian elimination. One of the real benefits of Gaussian elimination is that it is very procedural, so it is something we can teach a computer or calculator.
For TI-83/84 calculators, we can use the techniques listed in this Math Boot Camp page. We would usually put the entire augmented matrix in the calculator and you will get the solution to the system. This will also tell you if you have a dependent or inconsistent matrix. You can also go through the steps in Excel as well. Here are a few videos to help you learn to row-reduce matrices with technology:
Example of an Application Problem
Peter is planning on investing in what’s called a three fund portfolio, consisting of a U.S. stock mutual fund, an international stock mutual fund, and a bond mutual fund. He has a total of $200,000 to invest, and wants four times as much invested in stocks as in bonds. The bond fund has a historical return of 4.4%, the U.S. stock fund has a historical return of 8.3%, and the international stock fund has a historical return of 5.4%. If Peter is hoping for a $13,300 return, how should he allocate his investment?
Of course, historical returns cannot predict future earnings, but they’re the best information we have, so we’ll use them.
We have a system of three equations in three variables.
Let be the amount invested in U.S. stocks at 8.3% return, and
Let be the amount invested in international stock at 5.4% return.
Let be the amount invested in the bond fund at 4.4% return,
We have a total of $200,000 to invest, so

He wants four times as much invested in stocks as in bonds, so


And using the return rates and the desired earnings,

We can take this system and put it into an augmented matrix.
![\left[ {\begin{array}{*{20}{c}} 1&1&1\\ 1&1&{ - 4}\\ {0.083}&{0.054}&{0.044} \end{array}\,\,\left| {\begin{array}{*{20}{c}} {200,000}\\ 0\\ {13,300} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-98185631b9831196ddade6eb604c497e_l3.png "Rendered by QuickLaTeX.com")
Using a TI-83/84 Calculator:
- Hit 2nd
 and
and  to EDIT
to EDIT - Choose [A] and enter 3 rows and 4 columns
- Type in the augmented matrix above
- Hit 2nd MODE to Quit out of the matrices
- Hit 2nd again and to CALC
- Scroll down to rref and hit enter
- Hit 2nd again and hit enter for [A]
- Enter again
Now we have the reduced row-echelon form of the matrix:
![\left[ {\begin{array}{*{20}{c}} 1&0&0\\ 0&1&{0}\\ {0}&{0}&{1} \end{array}\,\,\left| {\begin{array}{*{20}{c}} {100,000}\\ {60,000}\\ {40,000} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-9b3a01eecef7b30a126f168c1b02f897_l3.png "Rendered by QuickLaTeX.com")
This tells us our answer is $100,000 invested in U.S. stocks, $60,000 in international stocks, and $40,000 in bonds.
Number of Possible Solutions: Dependent and Inconsistent Systems
With three-by-three systems, the possibilities for number of solutions are:
- Systems that have a single solution are those which, after elimination, result in a solution set consisting of an ordered triple . Graphically, the ordered triple defines a point that is the intersection of three planes in space as illustrated in (a) below.
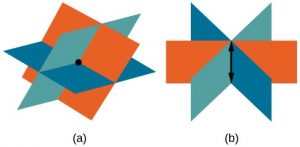
- Systems that have an infinite number of solutions are those which, after Gaussian elimination, have a row of all zeros, equivalent to the statement 0 = 0. Graphically, an infinite number of solutions represents a line or coincident plane that serves as the intersection of three planes in space as illustrated in (b) to the right.
- Systems that have no solution are those that, after Gaussian elimination, have a row of all zeros in the coefficient matrix and a nonzero-entry on the right hand side, equivalent to a statement such as Graphically, a system with no solution is represented by three planes with no point in common. There are several ways this can happen, as shown below.
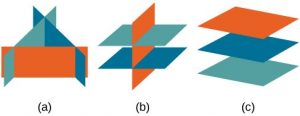
All three figures represent three-by-three systems with no solution. (a) The three planes intersect with each other, but not at a common point. (b) Two of the planes are parallel and intersect with the third plane, but not with each other. (c) All three planes are parallel, so there is no point of intersection.
Examples
Solve the following system of linear equations using matrices.

Write the augmented matrix.
![\left[ {\begin{array}{*{20}{c}} { - 1}&{ - 2}&1\\ 2&{\,\,\,3}&0\\ 0&1&{ - 2} \end{array}\,\,\,\left| {\,\begin{array}{*{20}{c}} {\,\, - 1}\\ 2\\ {\,\,0} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-b74318d105549a5961625b8e4c48adc3_l3.png "Rendered by QuickLaTeX.com")
When you enter this into software to obtain the reduced row-echelon form, you might obtain:
![\left[ {\begin{array}{*{20}{c}} {1}&{0}&3\\ 0&{3}&0\\ 0&1&{ - 2} \end{array}\,\,\,\left| {\,\begin{array}{*{20}{c}} {1}\\ 0\\ {0} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-b98d93818beea83ead326d83c5769f55_l3.png "Rendered by QuickLaTeX.com")
This matrix represents the following system:

We see by the identity 0=0 that this is a dependent system with an infinite number of solutions. We then find the generic solution. By solving the first and second equations by , we will have everything in terms of z.

If we let equal any real number,  and we have the general solution for the system:
and we have the general solution for the system: 
Try it Now 5
Use technology to find a solution (if possible) for the system:

Try it Now Answers
![\left[ {\begin{array}{*{20}{c}} 4&{ - 3}\\ 3&{\,\,2} \end{array}\left| {\,\,\begin{array}{*{20}{c}} {11}\\ {\,\,4} \end{array}} \right.} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-5c7954b7ae36c0afbf1e9cb58741f045_l3.png "Rendered by QuickLaTeX.com")

- a.
 b.
b. ![\left[ {\left. {\,\begin{array}{*{20}{c}} {\,1}&{ - 2}&{\,\,3\\ {\,\,0}&{\,\,1}&3\\ {\,0}&{\,0}&{\,\,1} \end{array}\,} \right|\begin{array}{*{20}{c}} {9\\ 5\\ 2 \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-73da47d4b380b5dd5bd209873faf50bd_l3.png "Rendered by QuickLaTeX.com")

- The row-reduced echelon form is:
![\left[ {\left. {\,\begin{array}{*{20}{c}} {\,1}&0&{\,\,\,4}\\ {\,\,0}&{\,1}&{ - 3}\\ {\,0}&{\,0}&{\,\,0} \end{array}\,} \right|\begin{array}{*{20}{c}} {\;0}\\ {\;0}\\ {\;1} \end{array}} \right]](https://ua.pressbooks.pub/app/uploads/quicklatex/quicklatex.com-4a48e93bde88a9877ad358eef97166bb_l3.png "Rendered by QuickLaTeX.com") Therefore, since the last row says 0 = 1, there is no solution.
Therefore, since the last row says 0 = 1, there is no solution.
Media Attributions
- 3x3systeminfsoln
- 3x3nosoln
